These are the Soccer rules for RoboCupJunior 2025. They are released by the RoboCupJunior Soccer League Committee. The English version of these rules has priority over any translations.
Teams are advised to check the RoboCupJunior Soccer site [1] and Soccer forum [2] for procedures and requirements for the international competition. Instead ask tournament organizers for local, regional and super-regional competitions. Each team is responsible for making sure they have the correct rules for each competition. Teams should ask for clarifications on the Forum where necessary. [3]
| Teams are encouraged to get in touch with the RoboCupJunior community on our Discord. Show what you’re working on, ask questions or join the weekly discussions on future rules and league design. [4] You can also reach the Soccer League Committee directly via email [5] |
Preface
In the RoboCupJunior Soccer challenge, teams of young engineers design, build, and program two fully autonomous mobile robots to compete against another team in matches. The robots must detect a ball and score into a color-coded goal on a special field that resembles a human soccer field.
To be successful, participants must demonstrate skill in programming, robotics, electronics and mechatronics. Teams are also expected to contribute to the advancement of the community as a whole by sharing their discoveries with other participants and by engaging in good sportsmanship, regardless of culture, age or result in the competition. All are expected to compete, learn, have fun, and grow.
RoboCupJunior Soccer consist of two sub-leagues: Soccer Open and Soccer Lightweight. These rules apply for both sub-leagues. There are two main differences between the two leagues.
-
Soccer Lightweight is played using a special ball that emits an IR signal. Robots may weigh up to 1.4 kg, may have a ball-capturing zone of up to 3.0 cm.
-
Soccer Open is played using a passive, brightly colored orange golf ball. Robots have no weight restriction and may have a ball-capturing zone of up to 1.5 cm.
| A large part of the overall ranking (for the international tournament, other tournaments operate differently) is determined by the judged categories. There are points for documentation, inteview performance etc. The method for calculation of the overall scores will be published on the RoboCupJunior Soccer Website at a later date but before the international competition. [6] |
If you would like to start with RoboCupJunior Soccer, please contact the organizer of your regional RoboCupJunior competition and ask them about Rule 8, “ENTRY LEAGUE”.
Unless specified otherwise, all parts of these rules are released under the terms of the Creative Commons Attribution-ShareAlike License.
1. RoboCupJunior International 2025 General Rules
These rules apply to the international RoboCupJunior competition. However, regional, super-regional, and local tournaments may have variations or adaptations to these rules to suit their specific competition needs. It is important to check with the organizers of the tournaments you are participating in to confirm which exact rules will be in use.
If teams are unsure about any aspects of the General Rules or specific League Rules, they are encouraged to inquire via the official RoboCupJunior Forum for clarification: https://junior.forum.robocup.org/
1.1. Team Size
Minimum Team Size: Teams must consist of at least 2 members.
Maximum Team Size:
-
Soccer and Rescue Leagues: 4 members.
-
OnStage League: 5 members.
Shared Members and Robots: No team member(s) or robot(s) may be shared between teams.
1.2. Team Members
Age Requirements for RoboCupJunior International Tournaments:
-
Minimum age: 14 years old.
-
Maximum age: 19 years old.
-
Age is counted as of July 1st for the international event each year.
Entry Leagues: RoboCupJunior Entry leagues and other "Primary" divisions (where minimum age may vary) are not run at the international competition but feature in many regions and SuperRegional tournaments.
Technical Roles: Every team member must have a defined technical role (mechanical/design, electrical/sensing, software etc.) and should be able to explain their role during technical judging.
1.3. Robot Communication
Permitted Communication: Communication between robots during gameplay is allowed as long as it uses the 2.4GHz spectrum and its power output does not exceed 100 mW EIRP under any circumstances.
Responsibility: Teams are responsible for managing their robot communication. Spectrum availability is not guaranteed.
Component Communication: Communication between components of the same robot is permitted under the general guidelines.
League Adaptability: Each league may modify the robot communication rules to ensure they meet their specific requirements.
1.4. Safety and Power Requirements
Electrical Power:
-
Robots must not use mains electricity.
-
Maximum allowed voltage: 48V DC or 25V AC RMS.
-
Voltage must be easily measured during inspections, and measuring points must be covered for safety or designed with safety considerations in place.
Battery Safety:
-
Lithium batteries must be stored in safety bags, and charging must be supervised by team members in competition areas.
-
Teams must follow safety protocols, including battery fire handling and evacuation procedures.
Robot Safety Design:
-
Power Management: Secure batteries, safe wiring, and emergency stop functionality.
-
Mechanical Safety: No sharp edges, pinch points, or other hazards. Actuators must be appropriate for the robot’s size and function.
-
Hazardous Behavior: Teams must report potentially dangerous robot behaviors at least two weeks before the event.
1.5. RCJ Team Posters
Purpose: Posters are a tool for sharing robot designs and insights with judges, teams, and the public. Posters will be hung in public competition areas in the venue and digital copies or photographs will be shared by RCJ after the competition.
Size: Posters must be no larger than A1 size (60 x 84 cm).
Content: Posters should summarize design documents and present the robot’s capabilities in an engaging format.
1.6. Technical Description Video (See League Documentation)
Content:
-
Robotic Demonstration: Show fully functional robot systems to highlight technical aspects.
-
Design Process: Explain design choices and team problem-solving approaches.
-
Presentation: Clear and high-quality, explaining innovative or unusual techniques.
-
Innovation & Sustainability: Highlight new technologies and sustainable practices.
Submission: Guidelines will specify video length and deadlines per league.
1.7. Sharing Team Resources
Sharing: Materials submitted by teams as part of the documentation submission will be shared on GitHub repositories for the leagues: https://github.com/robocup-junior
Credit: Teams must credit creators of external work and adhere to licensing rules. The focus should remain on personal growth and learning.
1.8. Plagiarism Guidelines
External Code Use: Teams are allowed to use external code but must credit the original creators.
Learning Priority: Teams should prioritize learning and not use complete solutions from others. Always pay attention to licensing rules.
1.9. Bill of Materials (BOM)
Submission: Teams must submit a BOM listing major components and materials used.
Details: The BOM must include:
-
Component name/description (e.g., part number).
-
Supplier/source of the component (including PCBs/machined components).
-
Status (new/reused).
-
Kit or custom-built.
-
Price.
Template: A standardized BOM template will be provided with the league documentation submissions for the international competition.
Changes from the 2024 RoboCupJunior Soccer Rules
Detailed changes are listed below and link to the corresponding place in the rules.
2. GAMEPLAY
2.1. Game procedure and length of a game
RCJ Soccer games consist of two teams of robots playing soccer against each other. Each team has two autonomous robots. The game will consist of two halves. The duration of each half is 10-minutes. There will be a 5-minute break in between the halves.
Teams are expected to be at the field 5 minutes before their game starts. Being at the inspection table does not count in favor of this time limit. Teams that are late for the start of the game may be penalized one goal per 30 seconds at the referee’s discretion.
The final game score will be trimmed so that there is at most 10-goal difference between the losing and the winning team.
2.2. Pre-match meeting
At the start of the first half of the game, a referee will toss a coin. The team mentioned first in the draw shall call the coin. The winner of the toss can choose either which end to kick towards, or to kick off first. The loser of the toss chooses the other option. After the first half, teams switch sides. The team not kicking off in the first half of the game will kick off to begin the second half of the game.
During the pre-match meeting the referee(s) may check whether the robots are capable of playing (i.e., whether they are at least able to follow and react to the ball). If none of the robots is capable of playing, the game will not be played and zero goals will be awarded to both teams.
2.3. Kick-off
Each half of the game begins with a kick-off. All robots must be located on their own side of the field. All robots must be halted. The ball is positioned by a referee in the center of the field.
The team kicking off places their robots on the field first.
The team not kicking off will now place their robots on the defensive end of the field. All robots on the team not kicking off must be at least 30 cm away from the ball (outside of the center circle).
Robots cannot be placed out of bounds. Robots cannot be repositioned once they have been placed, except if the referee requests to adjust their placement to make sure that the robots are placed properly within the field positions.
On the referee’s command (usually by whistle), all robots will be started immediately. Any robots that are started early will be removed by the referee from the field and deemed damaged.
Before a kick-off, all damaged or out-of-bounds robots are allowed to return to the playing field immediately if they are ready and fully functional.
If no robots are present at a kick-off (because they have moved out-of-bounds Rule 2.8, “Out of bounds” or are damaged Rule 2.9, “Damaged robots”), the penalties are discarded and the match resumes with a Rule 2.3.1, “Neutral kick-off”.
2.3.1. Neutral kick-off
A neutral kick-off is the same as the one described in Rule 2.3, “Kick-off” with a small change: all robots must be at least 30 cm away from the ball (outside of the center circle).
2.4. Scoring
A goal is scored when the ball strikes or touches the back wall of the goal. Goals scored by any robot have the same end result: they give one goal to the team on the opposite side. After a goal, the game will be restarted with a kick-off from the team who was scored against.
2.5. Ball movement
A robot cannot hold a ball. Holding a ball is defined as taking full control of the ball by removing all of degrees of freedom. Examples for ball holding include fixing a ball to the robot’s body, surrounding a ball using the robot’s body to prevent access by others, encircling the ball or somehow trapping the ball with any part of the robot’s body. If a ball does not roll while a robot is moving, it is a good indication that the ball is trapped.
The only exception to holding is the use of a rotating drum (a "dribbler") that imparts dynamic back spin on the ball to keep the ball on its surface.
Other players must be able to access the ball.
The ball needs to stay within the bounds of the field, as defined by the walls. If a robot moves the ball outside of the field (that is, beyond the walls or above their height), it is deemed damaged. (Rule 2.9, “Damaged robots”)
Any robot must approach and touch the ball when it is placed on the nearest neutral spot. It must do this before lack of progress is called. When on its own side of the field, any robot must be able to move the ball from the nearest neutral spot to the opponent’s side of the field. If a specific robot does not act this way, referees may deem it damaged at their discretion. (See Damaged Robots.) This rule does not apply if the robot is hindered from detecting or playing the ball by the opponent.
| If placing the ball on a neutral spot would confer a gameplay advantage to one team or referees don’t place the ball on the closest neutral spot for other reasons a robot is not required to approach the robot at further away neutral spots. |
2.6. Inside the Penalty Area
No robots are allowed to be fully inside the penalty area. As the penalty areas are marked with a white line, the Out of Bounds rule applies as well. (Rule 2.8, “Out of bounds”)
If two robots from the same team are at least partially in a penalty area, the robot further from the ball will be moved to the furthest unoccupied neutral spot immediately. If this happens repeatedly, a robot may be deemed damaged at referee’s discretion. (Rule 2.9, “Damaged robots”)
If an attacking and a defending robot touch each other while at least one of them is at least partially inside the penalty area, and at least one of them has physical contact with the ball, this may be called "pushing" at the referee’s discretion. In this case, the ball will be moved to the furthest unoccupied neutral spot immediately.
If a goal is scored as a result of a "pushing" situation, it will not be granted.
2.7. Lack of progress
Lack of progress occurs if there is no progress in the gameplay for a reasonable period of time and the situation is not likely to change. Typical lack of progress situations are when the ball is stuck between robots, when there is no change in ball and robot’s positions, or when the ball is beyond detection or reach capability of all robots on the field.
After a visible and loud count [7],
a referee will call lack of progress and
will move the ball to the nearest unoccupied neutral spot. If this does not
solve the lack of progress, the referee can move the ball to a different
neutral spot.
2.8. Out of bounds
If a robot touches a wall or moves completely into the penalty area it
will be called for being out of bounds. When this situation arises, the
robot is removed from the field for a one-minute penalty.
There is no time stoppage for the game itself. The robot is
allowed to return if a kick-off occurs before the penalty has elapsed.
The one-minute penalty starts when the robot is removed from play. Furthermore, any goal scored by the penalized team while the penalized robot is on the field will not be granted. Out-of-bounds robots can be fixed if the team needs to do so, as described in Rule 2.9, “Damaged robots”.
After the penalty time has passed, robot will be placed on the unoccupied neutral spot furthest from the ball, facing its own goal.
A referee can waive the penalty if the robot was accidentally pushed out of bounds by an opposing robot. In such a case, the referee may have to slightly push the robot back onto the field.
2.9. Damaged robots
If a robot is damaged, it has to be taken off the field and must be fixed before it can play again. Even if repaired, the robot must remain off the field for at least one minute or until the next kick-off is due.
Some examples of a damaged robot include:
-
it does not respond to the ball, or is unable to move (it lost pieces, power, etc.).
-
it continually moves into the penalty area or out of bounds.
-
it turns over on its own accord.
After a robot has been fixed, it will be placed on the unoccupied neutral spot furthest from the ball, facing its own goal.
Only the referee decides whether a robot is damaged. A robot can only be taken off or returned with the referee’s permission.
If both robots from the same team are deemed damaged at kick-off, gameplay will be paused and the remaining team will be awarded 1 goal for each elapsed 30 seconds that their opponent’s robots remain damaged. However, these rules only apply when none of the two robots from the same team were damaged as the result of the opponent team violating the rules.
Whenever a robot is removed from play, its motors must be turned off.
2.10. Human interference
Except for the kick-off, human interference from the teams (e.g. touching the robots) during the game is not allowed unless explicitly permitted by a referee. Violating team(s)/team member(s) may be disqualified from the game.
The referee(s) can help robots get unstuck if the ball is not being disputed near them and if the situation was created from normal interaction between robots (i.e. it was not a design or programming flaw of the robot alone). The referee(s) will pull back the robots just enough for them to be able to move freely again.
2.11. Interruption of Game
In principle, a game will not be stopped.
A referee can stop the game if there is a situation on or around the field which the referee wants to discuss with an official of the tournament or if the ball malfunctions and a replacement is not readily available.
When the referee has stopped the game, all robots must be stopped and remain on the field untouched. The referee may decide whether the game will be continued/resumed from the situation in which the game was stopped or by a neutral kick-off.
3. ROBOTS
3.1. Interference
Robots are not allowed to be colored orange, yellow or blue in order to avoid interference. Orange, yellow, blue colored parts used in the construction of the robot must either be occluded by other parts from the perception by other robots or be taped/painted with a neutral color.
Robots must not produce magnetic interference in other robots on the field.
Robots must not produce visible light that may prevent the opposing team from playing when placed on a flat surface. Any part of a robot that produces light that may interfere with the opposing robot’s vision system must be covered. For Lightweight-specific regulations see Rule 6.2.2, “Infrared interference in Lightweight”
The referee can interrupt a game in progress if any kind of interference from spectators is suspected (IR emitters, camera flashes, mobile phones, radios, computers, etc.). However, robots are expected to be capable of dealing with any visible colors above the walls (e.g. blue, yellow, green or orange shirts) either in hardware (e.g. limiting the field of view from looking up) or in software (e.g. masking the input image).
A team claiming that their robot is affected by the other team’s robot in any way must show the proof/evidence of the interference. Any interference needs to be confirmed by the tournament organizers if a claim is placed by the other team.
3.2. Control & Communication
The use of remote control of any kind is not allowed during the match. Robots must be controlled autonomously.
For only the World Championships, starting in Brazil 2025, use of a Communications Module is required for referees to control the robots. See Rule 7.2, “International Competition Specifics”
3.3. Agility
Robots must be constructed and programmed in a way that their movement is not limited to only one dimension (defined as a single axis, such as only moving in a straight line). They must move in all directions, for example by turning.
3.4. Handle
All robots must have a stable and easily noticeable handle to hold and to lift them. The handle must be easily accessible and allow the robot to be picked up from at least 5 cm above the highest structure of the robot. * There must be a minimum clearance of 5 cm for hands between the highes non-handle part of the robot and the handle. *
The dimensions of the handle may exceed the robot height limitation, but the part of the handle that exceeds this limit cannot be used to mount components of the robot.
The weight of the robot includes that of the handle.
3.5. Top Markers
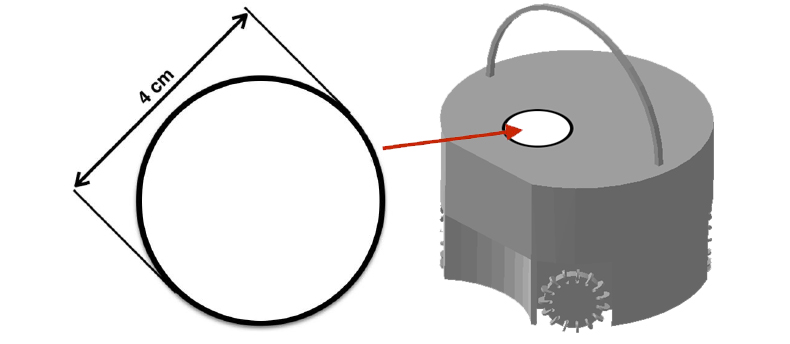
A robot must have markings in order to be distinguished by the referee. Each robot must have a white plastic circle with a diameter of at least 4 cm mounted horizontally on top. This white circle will be used by the referee to write numbers on the robots using markers, therefore the white circles must be accessible and visible. The top markers do not need to be within the size limit of the robot.
Before the game, the referee will designate the numbers for each robot and will write them on the top white circle. Robots not carrying the top white circle are not eligible to play.
3.6. Violations
Robots that do not abide by the specifications/regulations (see Rule 6.2, “Regulations”) are not allowed to play, unless these rules specify otherwise.
If violations are detected during a running game the team may be disqualified for that game.
If similar violations occur repeatedly, the team may be disqualified from the tournament.
3.7. Material specifications
Detailed specifications of the ball and fields can be found here [8].
3.8. Soccer Lightweight Ball change 2026
Starting in 2026, Lightweight Soccer will be moving to a new IR Ball. The key difference with this ball is the size change from 74mm to 42mm diameter, which is the same size as the Open League’s passive ball. More information will be released during the 2025 season by the Committee. This ball is Open-Source, so anyone can produce one from the files & instructions on the GitHub Page here: https://github.com/robocup-junior/ir-golf-ball . Entry Leagues will continue to use the large infrared ball. [9]
3.9. Tournament balls
Balls for the tournament must be made available by the tournament organizers. Tournament organizers are not responsible for providing balls for practice.
4. CODE OF CONDUCT
4.1. Fair Play
It is expected that the aim of all teams is to play a fair and clean game of robot soccer. It is expected that all robots will be built with consideration to other participants.
Robots are not allowed to cause deliberate interference with or damage to other robots during normal gameplay.
Robots are not allowed to cause damage to the field or to the ball during normal gameplay.
A robot that causes damage may be disqualified from a specific match at the tournament organizer’s discretion.
Humans are not allowed to cause deliberate interference with robots or damage to the field or the ball.
5. CONFLICT RESOLUTION
5.1. Referees
The referee(s) are in charge of making decisions with regards to the game, according to these rules.
During gameplay, the decisions made by the referee(s) are final.
Only the team member(s) at the table have a mandate to freely speak to the referee(s).
At the conclusion of the game the results become final with signatures from both teams. Disputes need to be settled before signing.
5.2. Rule clarification
Rule clarification may be made by members of the tournament organizers and the Soccer League Committee, if necessary even during a tournament.
5.3. Rule modification
If special circumstances, such as unforeseen problems or capabilities of a robot occur, rules may be modified by the tournament organizers, if necessary even during a tournament.
5.4. Competition specifics
Each competition (from local to international) may have adapted rules and added specifics (scoring, interviews, tournament modes, rule variations etc.). Check with organizers of each tournament you participate in.
6. LEAGUE REGULATIONS
6.1. Preamble
For RoboCupJunior , there are two sub-leagues as follows
-
Soccer Lightweight
-
Soccer Open
The matches in the Soccer Open sub-league are conducted using a passive ball, whereas the matches in the Soccer Lightweight sub-league are played using the IR ball. [10]
6.2. Regulations
6.2.1. Dimensions
Robots will be measured in an upright position with all parts extended. A robot’s dimensions must not exceed the following limits:
sub-league |
Soccer Open |
Soccer Lightweight |
size [0] |
18.0 cm |
22.0 cm |
height |
18.0 cm |
22.0 cm |
weight |
No limit [11] |
1400 g |
ball-capturing zone |
1.5 cm |
3.0 cm |
| [0] Robot must fit smoothly into a cylinder of this diameter |
Ball-capturing zone is defined as any internal space created when a straight edge is placed on the protruding points of a robot. This means the ball must not enter the convex hull of a robot by more than the specified depth. Furthermore, it must be possible for another robot to take possession of the ball.
6.2.2. Infrared interference in Lightweight
Components designed to emit IR (e.g. ToF, LiDAR, IR distance sensors, IR LEDs/LASERs etc.) are not allowed and tournament organizers will require such devices to be removed or covered up.
6.2.3. Limitations
A robot may use any number of cameras without restrictions on lenses, optical parts, optical systems, and total field of view. Components may be sourced in any way the team sees fit.
[12]
Kicker strength is subject to compliance check at any time during the competition. During gameplay, a referee can ask to see a sample kick on the field before each half when a damaged robot is returned to the field or when the game is about to be restarted after a goal. If the referee strongly suspects that a kicker exceeds the power limit, they can require an official measurement. See Appendix A, Kicker Power Measuring Procedures for more details.
6.2.4. Construction and Programming
Use of robot kits is allowed only if the "soccer playing" part is done only by the students. Kits not specifically made for Soccer can be used without restriction but hard- or software specifically made to play soccer cannot be used if it is not developed by the team.
Current team members must have done a majority of the development on hard- and software of the robot. Parts done by former team members must be outweighed by contributions from current team members.
Since a contact with an opponent robot and/or dribbler that might damage some parts of robots cannot be fully anticipated, robots must have all its active elements properly protected with resistant materials. For example, electrical circuits and pneumatic devices, such as pipelines and bottles, must be protected from all human contact and direct contact with other robots.
| All dribbler gears must be covered with metal or hard plastic. |
6.2.5. Inspections
Robots must be inspected and certified every day before the first game is played. The tournament organizers may request other inspections if necessary, including random inspections which may happen at any time.
7. INTERNATIONAL COMPETITION
7.2. International Competition Specifics
Starting from the 2025 International Competition in Brazil, the Soccer League Committee will provide each team with a Communication Module. This allow for easier co-ordination of games and referee control of robots during matches. Each team will be expected to interface with this module using a single 2.54mm GPIO pin at present to start and stop the robots. The Soccer League Committee plans on extending this to using UART for more complex applications in future years. Please see the GitHub page for more information on the module: https://github.com/robocup-junior/soccer-communication-module The module itself may exceed the maximum height of the robot. It must be placed at least 1cm away from the outside and protected from impact damage.
7.3. Interviews
During the international competition, the tournament organizers may arrange to interview teams during the Setup Day of the event. This means that the teams need to be already present early on this day.
Details on what is required for and what to expect from interviews can be found in the scoring document available here [14].
The Soccer League Committee recommends the implementation of interviews in regional competitions as well, but this is not mandatory. Teams should check with tournament organizers if they hold interviews and if so and what kind of interview to expect.
7.4. Technical Challenges
Inspired by the major leagues and the need for further technological advancement of the leagues, the Soccer League Committee runs what are called Technical Challenges. New challenges are added each year, and are unknown until during the International Competition.
The idea of these challenges is to give the teams an opportunity to show off various abilities of their robots which may not get noticed during the regular games. Furthermore, the Soccer League Committee envisions these challenges to be a place for testing new ideas that may make it to the future rules, or otherwise shape the competition.
Any RoboCupJunior Soccer team will be eligible to try to tackle these challenges.
7.5. Further information on International Competition
All teams qualified to the international competition must share their designs, both hardware and software, with all present and future participants. These teams are also required to send a digital portfolio before the competition. Further details on how will be provided by the Soccer League Committee which acts as the tournament organizers for the international competition.
During the competition days of the international competition (as well as before the event) the team members are responsible for checking all relevant information published by the Soccer League Committee or any other RoboCup official.
There will also be a SuperTeam competition, in which various teams from around the world share their robots in one "SuperTeam" and play against other SuperTeams on a so called "Big Field". Teams could utilise different camera lenses or sensors optimised for the larger playing fields to improve their performance. The full rules of this challenge can be found at https://robocup-junior.github.io/soccer-rules/master/superteam_rules.html
Teams competing in the international competition can receive awards for their performance. These awards are decided and introduced by the Soccer League Committee, which publishes all necessary details well before the actual event. In the past years they were awarded for best poster, presentation, robot design, team spirit and individual games. [15]
8. ENTRY LEAGUE
In order to help newcomers experience the RoboCupJunior Soccer competition, the Soccer League Committee would like to encourage competitions to include a so called "Entry League". Although such a league will not be part of the international competition, the Soccer League Committee still believes that it is worthwhile to make it part of regional and super-regional competitions. To this end, the Soccer League Committee has prepared a suggested ruleset. [16] Some regional and super-regional competitions already have rulesets and will likely make changes to the suggested rulesets or replace them entirely for their events. [17] Teams should ask their local/regional/super-regional tournament organizers for details on what Entry leagues (if any) will be running in their region.
Appendix A: Kicker Power Measuring Procedures
All robot kickers will be tested with the tournament ball used in the sub-league they participate in. Kicker Power will be measured by means of an on-field test. The bounce off the walls can change depending on field consturction. Teams should make sure they can adjust the power of their kicker if necessary.
The test is performed as follows: